One of the most persistent challenges in automation is handling objects that are not neatly arranged...

In controlled environments, robots perform well. But introduce variation, objects in random positions, overlapping, or arriving unpredictably, and the problem becomes far more complex.
Tordivel’s 3D robot vision systems are designed to operate in exactly these conditions.
Built around Scorpion Vision Software® and the Scorpion 3D Stinger, these systems generate accurate, real-time 3D data. This allows robots to identify objects, determine their position and orientation, and execute precise pick-and-place operations, even in cluttered or unstructured environments.
A typical setup is straightforward in principle: a 3D camera positioned above the workspace or mounted on a robot, connected to an industrial PC running the vision software. The complexity lies in the processing. The system continuously interprets spatial data and communicates with robots using standard industrial interfaces, ensuring compatibility across platforms.
What distinguishes this approach is flexibility. Instead of requiring carefully controlled inputs, the system adapts to variation. Objects can arrive in bins, on conveyors, or in mixed configurations, and still be handled reliably.
This makes it suitable for applications such as:
The effect is a subtle but important shift. Rather than forcing the environment to suit the machine, the machine adapts to the environment, reducing manual intervention, simplifying system design, and improving overall efficiency.
Scorpion 3D Stinger™ captures images, identifies and locates the product and sends the id and 3D location to a picking robot.
Some automation problems cannot be solved with rules alone.
When variation becomes too great, when objects overlap, change shape, or appear unpredictably, systems need to interpret, not just detect.
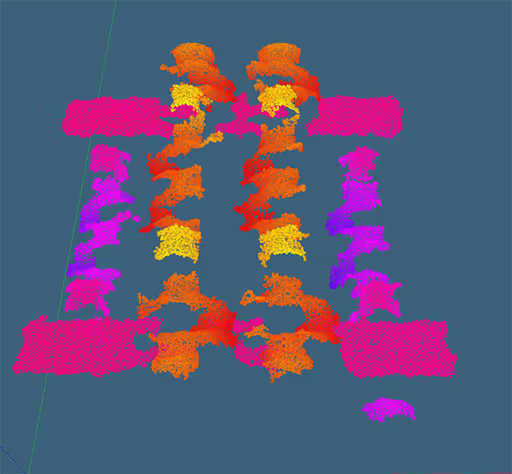
Tordivel’s Realtime 3D Neural Robot Vision is designed for exactly these situations. It combines stereo-based 3D imaging with neural network processing to create systems that are both flexible and robust.
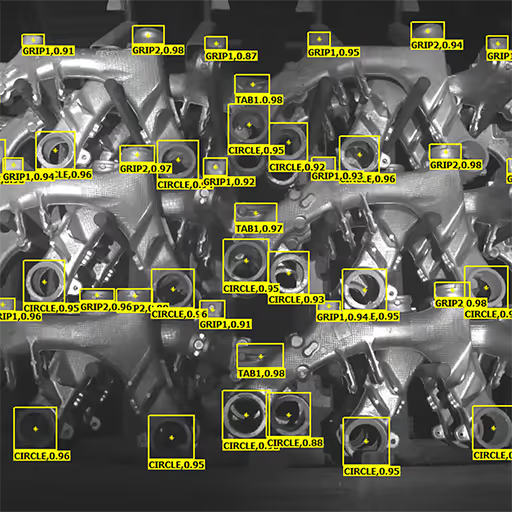
The process begins with 3D perception. Stereo vision generates accurate spatial data, capturing both the position and orientation of objects. This data is then processed using neural models, allowing the system to identify and localise objects even in complex or cluttered environments.
By combining geometry with learned behaviour, the system can:
Compared to traditional rule-based systems, this approach reduces setup complexity and improves long-term stability. There is less need for manual tuning, and the system adapts more naturally to changes in production conditions.
The system also operates in real time, delivering low-latency data to industrial robots via standard interfaces such as TCP/IP. This enables seamless integration and immediate response during operation.
Typical outputs include:
In addition to guiding robots, the system supports detailed assembly verification, detecting missing or incorrectly placed components and validating complex geometries.
The result is a system that scales with complexity, remaining reliable even as variation increases.
Over 25+ years delivering high-end automation solutions for complex industrial needs.
Powerful 2D & 3D vision logic creation without extensive coding requirements.
Direct access to premium industrial cameras, illumination, and optics online.
Tailored systems specifically engineered for your sector's unique constraints.
Speak to our engineers about your project requirements. We provide end-to-end support from concept to installation.

Call us

Email us

Head Office (Norway)
Advanced machine vision automation solutions for a smarter, more efficient industrial future.


